SPI
https://elec.alampy.com/stm32/communication/spi_protocol/
SPI 协议简介¶
SPI(Serial Peripheral Interface)
- 是一种同步的串行通信协议,由 Motorola 公司在 1980 年代提出,用于芯片间通信
- 是一种主从式的通信协议,主设备可以同时控制多个从设备,但每个从设备只能被一个主设备控制
- 必须由主机发起通信(无论是发送还是接收),从机被动接受。从机不能主动发送数据。
- 通信速度快,但通信线路较多,常用于短距离的板内通信
特性¶
- 同步:需要主机提供时钟信号
- 串行:数据是一位一位发的
- 全双工:同时进行发送接收
- 主从工作方式
- 四线
- MOSI(DO)
- MISO(DI)
- SCK
- CS
接口形式¶
- SCLK(Serial Clock):时钟信号
- MOSI(Master Output / Slave Input):主设备输出、从设备输入
- MISO(Master Input / Slave Output):主设备输入、从设备输出
- CS(Chip Select):片选信号,用于选择从设备
协议参数¶
- 时钟极性(CPOL,Clock Polarity):时钟空闲状态为高电平还是低电平
- 时钟相位(CPHA,Clock Phase):数据在时钟的第一个边沿采样还是第二个边沿采样
- 时钟频率(SCLK,Serial Clock):时钟信号的频率
- 传输顺序:MSB 优先还是 LSB 优先
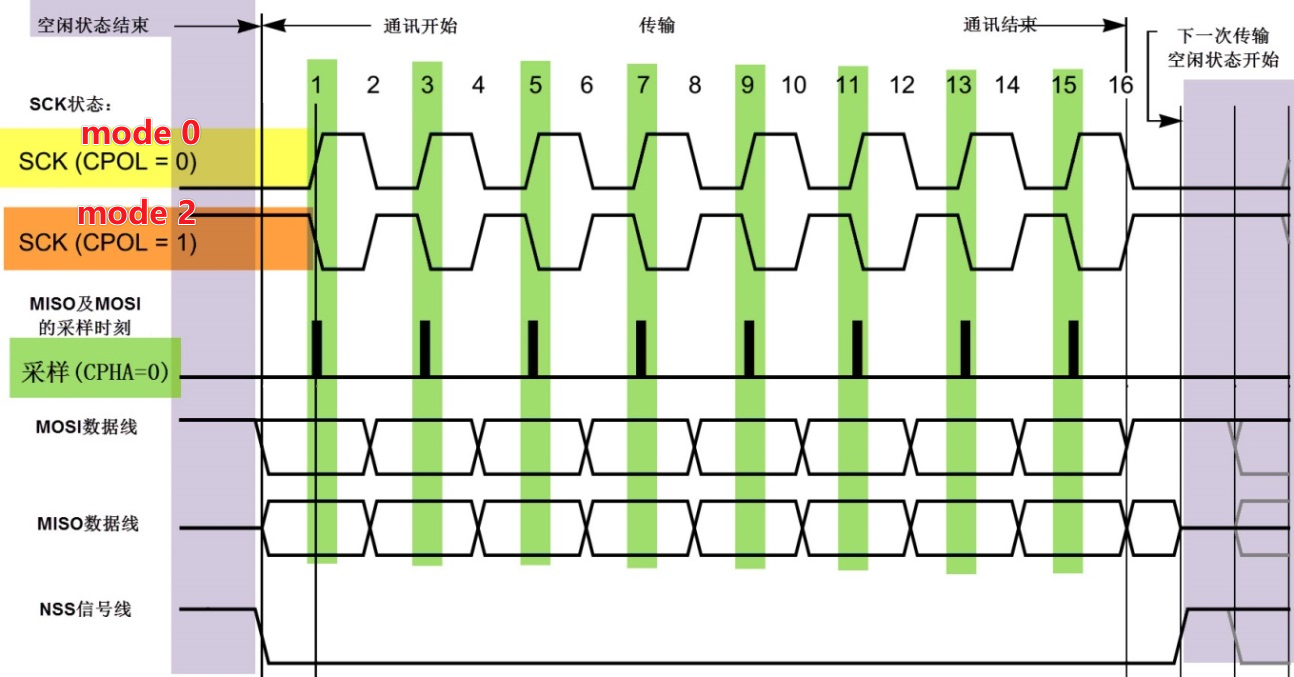
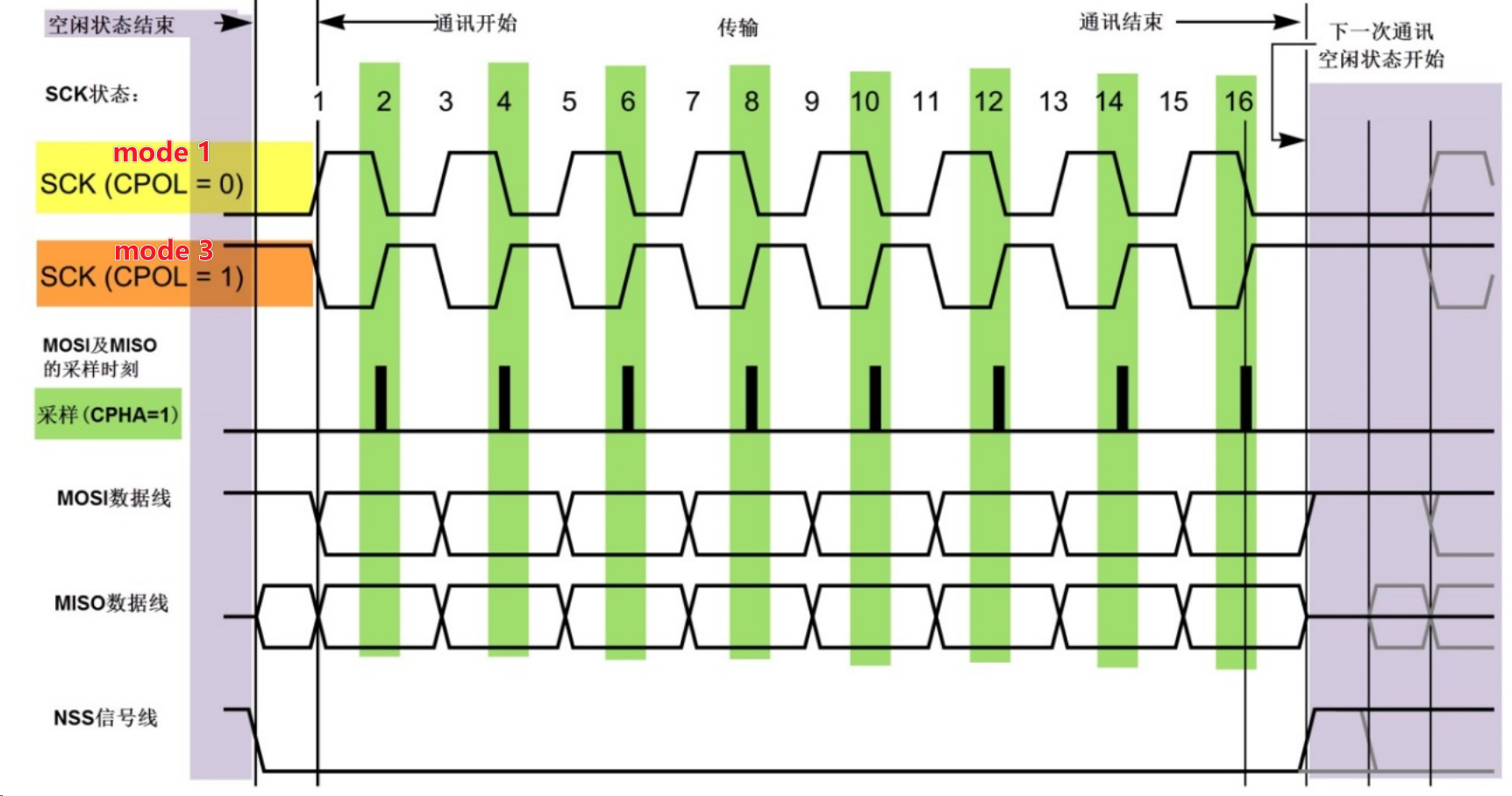
传输模式¶
- mode 0:CPOL=0,CPHA=0,SCK空闲低电平
- mode 1:CPOL=0,CPHA=1,SCK空闲低电平
- mode 2:CPOL=1,CPHA=0,SCK空闲高电平
- mode 3:CPOL=1,CPHA=1,SCK空闲高电平
Flash 测试¶
Flash(W25Qxx) 常用指令表¶
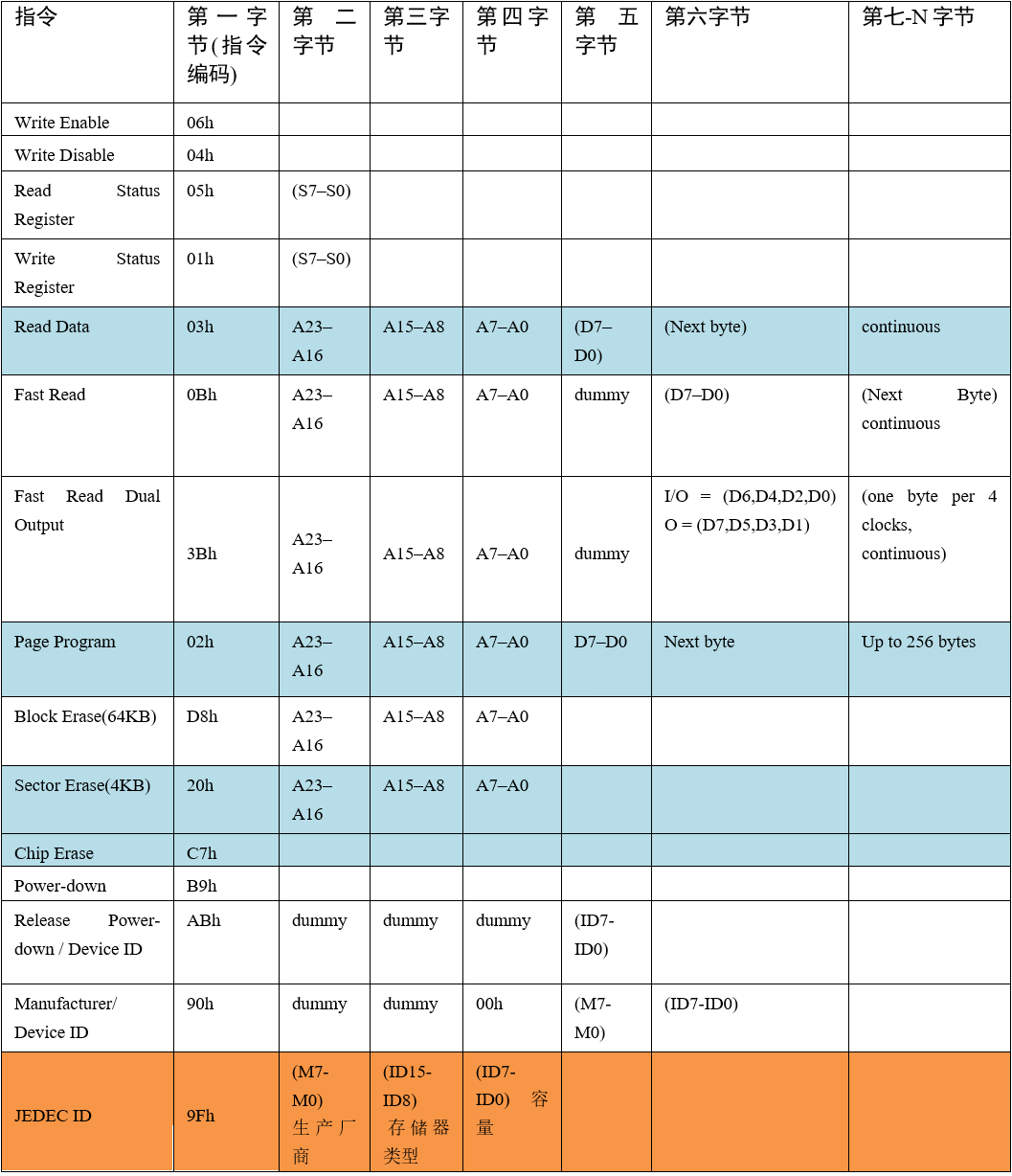
/*FLASH常用命令*/
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg 0x05
#define W25X_WriteStatusReg 0x01
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
/*其它*/
#define sFLASH_ID 0XEF4017
#define Dummy_Byte 0xFF